作者 |Jessie 出品 | 焉知 知圈 |进“底盘社群”请加微yanzhi-6,备注底盘 功能控制逻辑 与记忆泊车类似,记忆行车这一功能主要实现简单的面向服务的应用服务。实现的典型应用场景包括:上下班路线,接送儿童,商超采购等。即,驾驶员通过在系统上设置想要到达的目的地,激活记忆行车功能后,智驾车辆可以参照之前记忆的行车路线自主驾驶到目的地。期间,系统需要记忆用户示教路线,实现从 A 到 B 点的全场景领航辅助驾驶,包含自动通过路口、掉头、变道等。 实现记忆行车功能的步骤主要分为两步: 1)首先,驾驶员在手动驾驶下,将车辆从起始点A开到终点B。期间,记忆行车系统需要在后台完成如下工作:
2)其次,在激活记忆行车功能后,系统需要实现包含如下子功能:
一个比较尖锐的问题就是记忆行车和传统的城市自动驾驶在对整车场景的控制上会有哪些相同和不同点呢? 实际上,记忆行车可以看成一种狭义上的城市自动驾驶NOA。他们应用的传感器单元是完全一致的,唯一的差别的就是对地图的利用上。对于城市自动驾驶NOA来说,通常是会考虑直接导入高精地图做精确定位,并融合导航信息寻找车辆的下一步的行驶路径,而这里的记忆行车则需要区分为用户陪驾和系统试校准两步。 ①用户陪驾/手动建图 用户陪驾阶段又称为手动建图阶段。其过程是驾驶手动驾驶车辆过程中系统通过后台偷偷调用在线感知模块端口进行即时定位建图,使得临时的建图可以更好的替代城区/高速路所构建的地图,这个过程类似于在城市自动驾驶中的众包建图。这里需要注意的是,考虑到国家对数据安全、信息安全以及地图资质的问题,我们通过记忆建图的地图一般就是单车类型,该图是不能通过网络上传至云端的。当然,如果是针对由同一家tier1开发的同类车型可考虑通过软件升级方式将地图包在该车型内部进行资源共享。 ②智能建图 当然,如智能建图所描述的功能来说,要求同时进行两层次的计算。就有可能造成对资源的巨大消耗。这点上就对智驾域控的计算资源提出更大的需求。 ③智能推荐 智能推荐是记忆行车功能相对于传统智驾系统功能较大的区别点。一般情况下,传统的ADAS系统功能的激活通常是由驾驶员主动发起,系统处于被动激活。当然也有一些主机厂倾向于将整个功能做成可推荐式激活的方式。而记忆行车功能最大的特色就是“重定位+智能推荐”。即进入之前已经完成建图的某条路径上时,会对自车姿态和位置做定位匹配,再根据一定的HMI交互规则对进行智能推荐是否打开记忆行车功能。 这里需要注意的是,如果从A点到达B点过程中,驾驶员有可能在两段不同的时间内选择不同的驾驶路径行驶至终点。对于记忆建图来说,可能会存在存两段图的情况。 记忆行车感知智驾系统步骤分解 对于如上几种感知如何应用到实际的感知场景的分析过程可以通过如下例子对过程进行详细分析。 这里我们可以针对智能行车功能中的新的一项功能——“记忆行泊车”进行说明。记忆行泊车这类功能需要在自动驾驶的视觉环境中,通过驾驶员手动驾驶阶段在后台提前绘制车辆周围环境的地图,同时在用户地图中估计车辆的当前姿态。对于建图和重定位的关键任务之一是根据之前记录的车辆行驶路径重定位来重新定位行驶轨迹的方法。 1)自车建图重定位 首先,在场景训练阶段需要将自车行驶通过训练的“封闭路段”(这里的封闭是个广义的概念),针对从基础设施传输的地图HDMap作为底图进行智慧建图。当然,从车端的角度,也是需要结合一圈摄像头进行场景BEV建图。这里需要说明的是,从优先级上讲,我们一般会考虑在HDMap能够保证一定的精度进行正常发送时,一般以HDMap作为底图输入给车端。而BEV则作为HDMap失效后的兜底,为自车提供后备车辆定位地图。 下图显示了一个经典的基于特征的重定位pipelines。 3)后融合处理 记忆行车技术支持 1)记忆建图需求 记忆建图原则是一种纯车端传感感知的功能,但是考虑到建图过程中需要进行重定位和路径规划。因此,还需要结合GPS定位和导航地图这类关联系统的功能输入。 并且考虑定位的精准性、实时性,最好还能结合RTK这类即时定位修正单元对实际的定位过程进行实时修正。 2)建图存储空间需求 整个记忆行车功能比较大的资源消耗基本都体现在对于建图、存图和重定位上。特别是根据环境目标来即时建图上,需要充分考虑所构建的地图大小。这里和高精地图的众包建图类似,实际它是一种车端的建图过程。 这里需要说明的是整个记忆行车功能激活的路线长度需要做一定程度的限定。通常需要考虑在就近行驶情况。比如上下班的日常通勤时间,为1小时(大概为35km左右)。如考虑超过1.5小时通勤时一般会存在一定的高速/快速场景(大概为 40~50km),路程约为70-80km。我们考虑的记忆行车过程其最大的记忆路线通常设置为150km,每2M/公里触发一次地图数据存储。并且,对于记忆行车来说,其建图过程还涉及包含对一些高精地图覆盖的内部道路进行建图。这类稍微极端的建图成功率一般能达到90%。 建图过程主要采用小图到大图的拼接过程。即,通过通过定位的车身位置,考虑在其周围10-20m的范围内进行小图建图,随后通过小图拼接可以形成大图,最终使得拼接结果接近真值。 对于这类记忆建图来说一般会充分考虑采用差分数据更新的方式进行。通常,针对如上路段的存储需求一般10GB足够,这类地图通常也是存储在EMMC里面。 3)建图实时性要求 通常情况下,我们这里提到的记忆建图是在中低速情况下进行。因为速度越低意味着对同一个类似场景下的感知建图所处理的时间就越长。但是,如果考虑一些较长距离的通勤情况,在高速路段下的特征是否支持记忆建图呢? 记忆行车与NOA融合下的智能行车模式 主要考虑记忆地图和高精地图融合的技术难度和实现可能性,是否存在一键激活和后台自主切换模式。这里我们需要说明的是实际上ADAS系统功能本身在很多场景应用下也是和记忆行车有一定的重叠的。比如在考虑同一段行驶路线上的场景,当事前通过记忆行车功能对该段行驶路径已经完成建图后,当驾驶员重新驶入该路段起点,并且系统通过重定位成功后,便可以很顺利的进入记忆行车模式(当然这种进入前最好是需要通过HMI提示驾驶员是否准予进入)。但是,如果驾驶员这时候强制切换进入了ADAS系统功能,比如点对点驾驶辅助功能NOA后,系统是会根据驾驶优先级选择响应当前驾驶员主动操作指令的。那么从另一个角度上说,如果驾驶员首先进入的是NOA功能呢?当由于某些特殊原因,比如高精地图/导航地图短暂丢失导致NOA功能降级无法正常使用,但是记忆建图的信息仍旧存在时,是否可以很好从后台实现无感切换,从而确保用户更好的感知体验呢? 从基础原理上讲答案是肯定的。但是需要注意以下几点: 1)NOA无感切换到记忆行车,需要重点审视NOA的设置目的是否和记忆行车一致。如果一致才考虑切换,否则可能将用户送至另外的目的地,这是完全不能被接受的。 记忆建图与传统ADAS系统功能时序示意图 整个记忆行车处理时序图如下所示。整个记忆行车模块包括操作者Driver、MAD状态机、任务管理器、地图引擎、定位模块、感知模块、环境模型、规控等多个模块。首先,启动车辆上电后,记忆行车MAD的状态机变通过自检后反馈状态可用,然后派发任务项给记忆“地图引擎”,这里实际上是类似模仿高精地图的叫法。同时,也将感知任务派发给感知模块,感知模块启动感知任务后反馈检测结果给MAD状态机,MAD状态机通过重定位模块检查感知数据是否能够能够与之前建立的记忆地图相匹配。如果重定位成功,MAD状态机则派发成功标志给环境模型,同时,记忆地图和定位模块也会将相应的地图信息进行融合。最后,在规控模块进行整个轨迹规划和控制模块执行。 总结 记忆行车作为一种新兴的自动驾驶功能,可以说也是参照记忆泊车的功能设计方式形成的一种高效的行车场景驾驶方式。相比于记忆泊车而言,记忆行车基本对场景边界没有提出太大的要求,一般的道路均可以作为行驶条件。但是记忆行车强依赖于前置地图构建过程,当前置地图构建失败或者准确率不够时,就无法在通过记忆泊车进行有效的重定位和车辆控制。因此,本文也重点阐述了记忆泊车的地图构建、资源需求和重定位的基础算法。 扫描加入免费的「智慧城市之智慧交通」知识星球可了解更多行业资讯和资料。  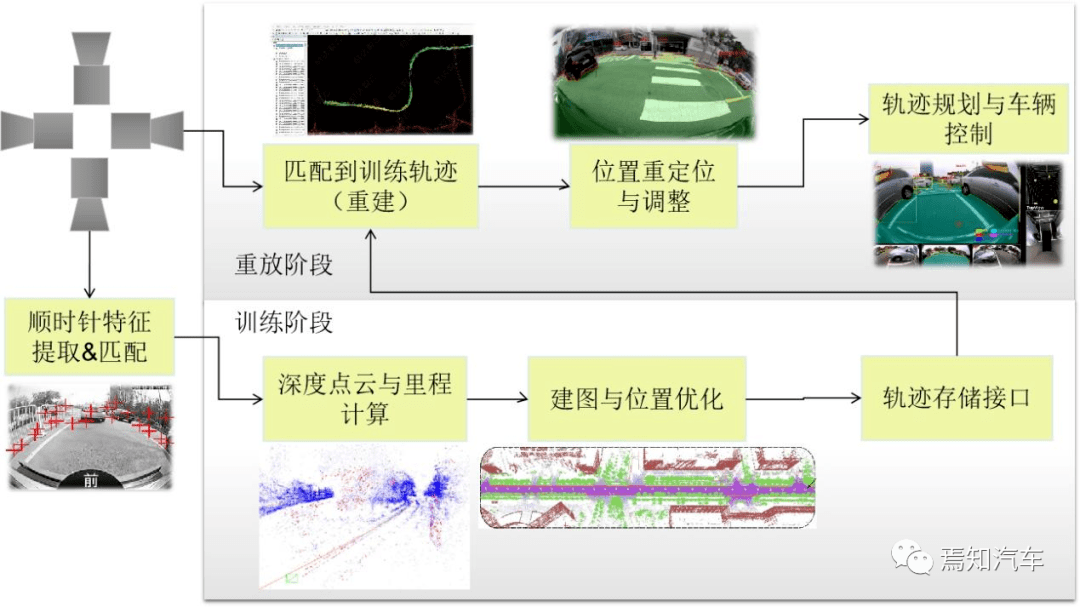   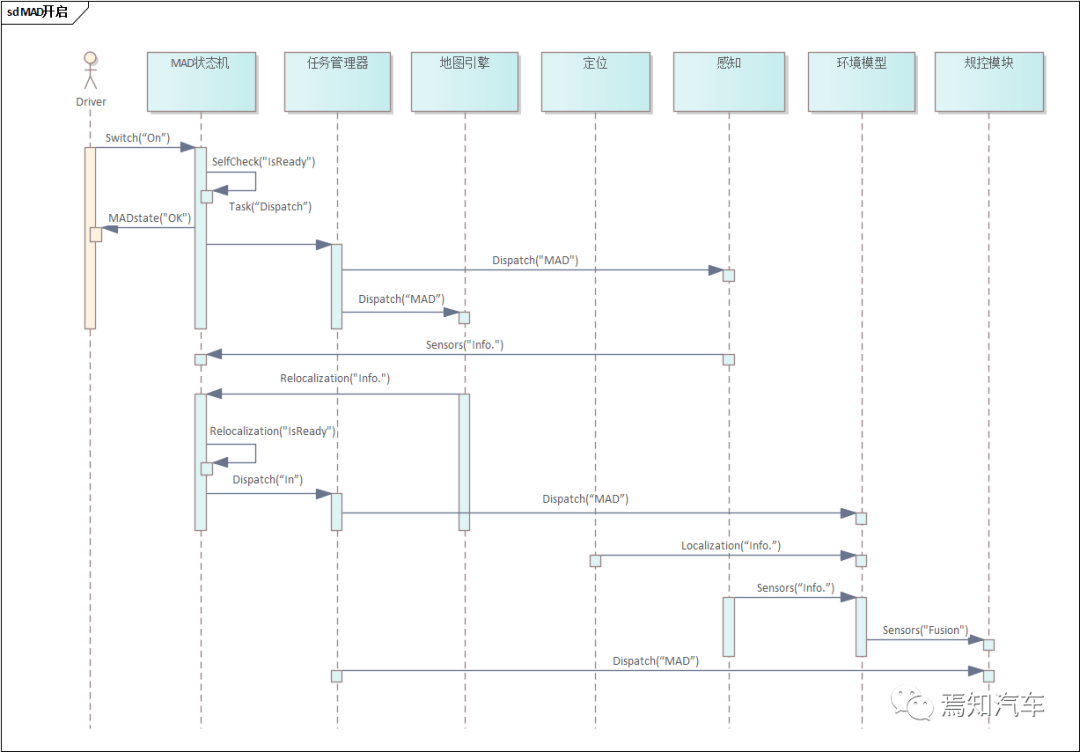 ┃ 免责声明:本文版权归原发布机构及作者,如涉及侵权请联系删除。本文仅供参考,如需使用相关信息请参阅报告原文。 ┃ 获取PDF完整版报告下载方式请关注:报告派 |







报告派(baogaopai.com)致力于发现互联网资讯,以信息普及传播价值为目的,每日分享热点行业报告、数据图表、精选研读深度报告,致力成为专业的行业研究报告与数据分享平台!
 百度小程序
百度小程序 访问手机版
访问手机版 微信公众号
微信公众号 微信小程序
微信小程序